
Page 38 - МІНІСТЕРСТВО АГРАРНОЇ ПОЛІТИКИ УКРАЇНИ
P. 38
38
боти агрегату, намітити методику вибору і розрахунку основних його параметрів,
накопичити досвід проектування.
В реальній практиці дуже багато одномірних динамічних систем, які функ-
ціонує за схемою «вхід-вихід» (див. рис. 3.3). В загальному випадку властивості
такої системи можуть бути виражені яким-небудь оператором W, який відтворює
природу перетворення нею вхідної величини х (t) у вихідну y (t);
y(t) = W x(t). (3.10)
Основною особливістю функціонування СГА/МТА як динамічних систем є
їх багатомірність, обумовлена не тільки числом врахованих вхідних і вихідних
параметрів, а і наявністю взаємозв’язку між ними. Останнє означає, що кожний
вхідний параметр одночасно може впливати на декілька вихідних.
Для сільськогосподарських агрегатів придатною моделлю функціонування
слід вважати модель з кількома вхідними процесами і одним вихідним компонен-
том вектора Y (технологічним, енергетичним тощо).
і
У випадку багатомірної динамічної моделі при перетворенні кожного вхід-
ного впливу х (t) у вихідну змінну y (t) будемо мати відповідний оператор W , су-
і
i
і
купність яких і визначатиме властивості всієї системи в цілому.
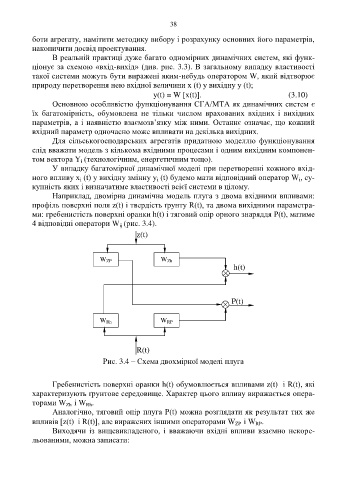
Наприклад, двомірна динамічна модель плуга з двома вхідними впливами:
профіль поверхні поля z(t) і твердість ґрунту R(t), та двома вихідними параметра-
ми: гребенистість поверхні оранки h(t) і тяговий опір орного знаряддя P(t), матиме
4 відповідні оператори W (рис. 3.4).
ij
z(t)
W ZP W Zh
h(t)
P(t)
W Rh W RP
R(t)
Рис. 3.4 – Схема двохмірної моделі плуга
Гребенистість поверхні оранки h(t) обумовлюється впливами z(t) і R(t), які
характеризують ґрунтове середовище. Характер цього впливу виражається опера-
торами W Zh і W .
Rh
Аналогічно, тяговий опір плуга P(t) можна розглядати як результат тих же
впливів z(t) і R(t), але виражених іншими операторами W ZP і W .
RP
Виходячи із вищевикладеного, і вважаючи вхідні впливи взаємно некоре-
льованими, можна записати: