
Page 34 - МІНІСТЕРСТВО АГРАРНОЇ ПОЛІТИКИ УКРАЇНИ
P. 34
34
Повертаючись до кривої, представленої на рис. 3.1 і описаною залежністю
(3.7), відмітимо, що вона не містить в собі ніякої інформації крім тої, яка була
отримана в ході досліду. Саме тому така модель є суто емпіричною.
З другого боку, дослідника часто цікавить природа поведінки об’єкту моде-
лювання. Відповідь на таке питання може дати функціональна модель, яка відтво-
рює її функції і показує зв'язок між ними. Найчастіше такі моделі мають вигляд
блочних схем.
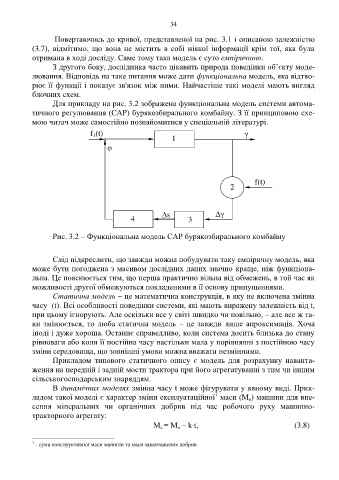
Для прикладу на рис. 3.2 зображена функціональна модель системи автома-
тичного регулювання (САР) бурякозбирального комбайну. З її принциповою схе-
мою читач може самостійно познайомитися у спеціальній літературі.
f (t) γ
1
1
φ
f(t)
2
Δs Δγ
4 3
Рис. 3.2 – Функціональна модель САР бурякозбирального комбайну
Слід підкреслити, що завжди можна побудувати таку емпіричну модель, яка
може бути погоджена з масивом дослідних даних значно краще, ніж функціона-
льна. Це пояснюється тим, що перша практично вільна від обмежень, в той час як
можливості другої обмежуються покладеними в її основу припущеннями.
Статична модель – це математична конструкція, в яку не включена змінна
часу (t). Всі особливості поведінки системи, які мають виражену залежність від t,
при цьому ігнорують. Але оскільки все у світі швидко чи повільно, – але все ж та-
ки змінюється, то люба статична модель – це завжди лише апроксимація. Хоча
іноді і дуже хороша. Останнє справедливо, коли система досить близька до стану
рівноваги або коли її постійна часу настільки мала у порівнянні з постійною часу
зміни середовища, що зовнішні умови можна вважати незмінними.
Прикладом типового статичного опису є модель для розрахунку наванта-
ження на передній і задній мости трактора при його агрегатуванні з тим чи іншим
сільськогосподарським знаряддям.
В динамічних моделях змінна часу t може фігурувати у явному виді. Прик-
1
ладом такої моделі є характер зміни експлуатаційної маси (М ) машини для вне-
е
сення мінеральних чи органічних добрив під час робочого руху машинно-
тракторного агрегату:
М = М – kt, (3.8)
е
о
1
- сума конструктивної маси машини та маси завантажених добрив