
Page 30 - МНД_ПЗ
P. 30
Таким чином, рішення диференційного рівняння (2) має вид:
= ocost
2Rx L
Або cos t (5)
o m 2
R
Моделювання коливань котка у поздовжньо-вертикальній
площині.
В діапазон комірок В1:В5 електронної таблиці Excel послідовно
заносимо значини Rx, L, m, R і о. Величину останньої задаємо в ме-
0
жах 1...3 .
Rx = 2000
L = 2
m = 300
R = 0,25
= 1 0,017444
о
k = 20,65591
t = 0 1 2 3 4 5
= 1 -0,233 -0,891 0,649 0,588 -0,924
i
В комірці В6 за формулою =КОРЕНЬ(2*В1*В2/(В3*В4^2) розмі-
= 0,017 -0,004 -0,016 0,011 0,010 -0,016
i
щуємо значину підкорінного виразу формули (5).
В комірки сьомої строчки електронної таблиці вводимо значини
часу (від нуля до 10 с, наприклад).
В комірці В8 розміщуємо результат розрахунку значини кута
за формулою =$B$5*COS($B$6*B$7). Вказану формулу копіюємо у
відповідні комірки восьмої строчки електронної таблиці.
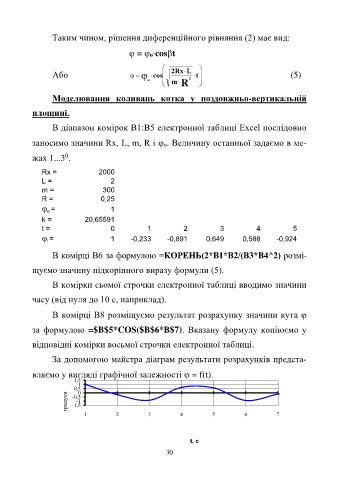
За допомогою майстра діаграм результати розрахунків предста-
вляємо у вигляді графічної залежності = f(t).
1,5
1
0,5
0
градуси -0,5
-1
-1,5
1 2 3 4 5 6 7
t, c
30