
Page 28 - МНД_ПЗ
P. 28
2.2 Вихідні дані до виконання роботи
Побудувати лінійну динамічну модель і з її допомогою досліди-
ти вплив конструктивних параметрів секції котка ККШ-6 на характер
його коливань у поздовжньо-вертикальній площині.
Технічна характеристика котка: маса m =300 кг; радіус R =0,25 м; тя-
говий опір Rx = 2 кН; відстань від осі до точки причеплення L=2 м.
2.3 Рекомендації щодо виконання роботи і оформлення звіту
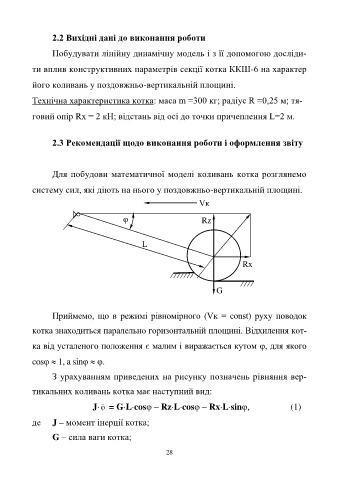
Для побудови математичної моделі коливань котка розглянемо
систему сил, які діють на нього у поздовжньо-вертикальній площині.
Vк
Rz
L
Rx
G
Приймемо, що в режимі рівномірного (Vк = const) руху поводок
котка знаходиться паралельно горизонтальній площині. Відхилення кот-
ка від усталеного положення є малим і виражається кутом , для якого
cos 1, a sin .
З урахуванням приведених на рисунку позначень рівняння вер-
тикальних коливань котка має наступний вид:
J = GLcos – RzLcos – RxLsin, (1)
де J – момент інерції котка;
G – сила ваги котка;
28