
Page 36 - ЕБМ
P. 36
наступні позна- тягового складові можна знаряддя
прийняті вертикальна передньонавісного -Рв·cosα + Pн·cosβ - Rx = f·Nк; (1) Pв·sinα - Pн·sinβ + 0.2·Rx + Gп = Nк; (2) Gп·(L+Lo) +Rx·K 1 = Nк·K 2, (3)
рівнянь Рв, Рн - зусилля в центральній та нижніх тягах переднього α, β - кути нахилу центральної та нижніх тяг ПНМ енерге- та Pf, Mf - сила та момент опору коченню опорного колеса знаряддя, Nк - вертикальна реакція на опорному колесі знаряддя, кН; L, Lo, Lп, d, b, z, - параметри, природа яких зрозуміла з Ри- Rz ≈ 0.2·Rx; z ≈ 0.5·h; Pf = f·Nк; Mf ≈ 0, Конструктивні параметри b і Lo досить легко виразити через кути нахилу тяг ПНМ та висоти ст
системі навісного механізму (ПНМ) енергетичного модуля МЕЗ, кН; горизонтальна f - коефіцієнт опору коченню; Gп - вага передньонавісного знаряддя, кН; h - глибина обробітку грунту, м; рівноваги К 1 = 0.2·(Lп+Lo) + d + b - 0.5·h; K 2 = Lк + Lo - f·(d+b-h).
приведеній - Rz Враховуючи, що рівняння
В тичного модуля МЕЗ; Rx, опору знаряддя, кН; записати у вигляді: де
чення: сунок1, м. остаточно (h н):
кН;
Теоретичні положення. До числа передньонавісних знарядь
частиною поздовж-
пе-
Скласти звіт, провести розрахунки та захистити роботу.
Агрегатування знаряддя із одним опорним колесом
складовою налагодженні в засобом
є помилковому
який енергетичним -Pв·sinα+ Pн·sinβ - Rz - Gп + Nк = 0; Gп·(L+Lo) +Rz·(Lп+Lo) +Rx·(d+b-z) +
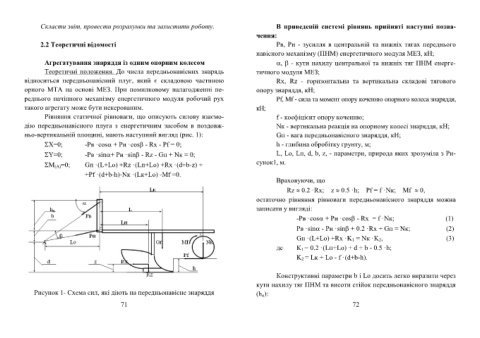
плуг, При МЕЗ. реднього начіпного механізму енергетичного модуля робочий рух Рівняння статичної рівноваги, що описують силову взаємо- з плуга ньо-вертикальній площині, мають наступний вигляд (рис. 1): -Рв·cosα + Pн·cosβ - Rx - Pf = 0; +Pf·(d+b-h)-Nк·(Lк+Lo) -Mf =0. Рисунок 1- Схема сил, які діють на передньонавісне знаряддя 71
2.2 Теоретичні відомості передньонавісний основі на МТА такого агрегату може бути некерованим. передньонавісного ΣX=0; ΣY=0; ΣM (A)=0;
відноситься орного дію