
Page 33 - ЕБМ
P. 33
(4) коліс (5)
(3) (6) (7) (8)
задніх та
Моменти Ма і Мв можна виразити наступним чином:
Ма = (Рка - Рfа)·r a; Мв = (Ркв - Рfв)·r в, де Рка, Ркв - дотичні сили тяги передніх і задніх коліс ЕМ передніх коченню r a, r в - радіуси кочення передніх і задніх коліс ЕМ, м. Рка = ϕ·Na; Рfа = f·Na; Ркв = ϕ·Nв; Рfв = f·Nв, З урахуванням виразів (3), (4), (5) і (6) рівняння (1) та (2) пі- Na = Gт - Y - Nв; Nв = ,
відповідно, кН; опору сили ЕМ МЕЗ відповідно, кН; де f - коефіцієнт опору коченню; ϕ - коефіцієнт використання зчіпної маси. сля відповідних перетворень приймуть вигляд: Y·(Zx - d -K) +Gт·(K-a т) +X·Zy тньо трьох незалежних рівнянь рівноваги ТМ:
- Рfв де К = (ϕ -f)·r а +L.
Рfа, У свою чергу:
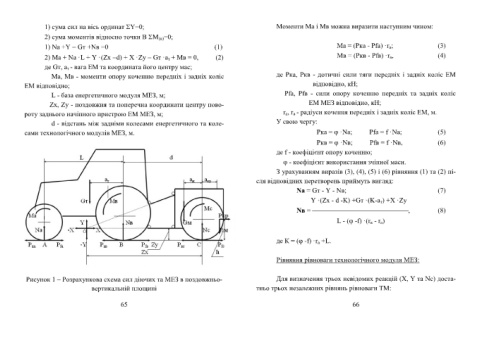
Ма, Мв - моменти опору коченню передніх і задніх коліс
2) Ma + Na·L + Y·(Zx −d) + X·Zy − Gт·a т + Mв = 0, (2)
Zx, Zy - поздовжня та поперечна координати центру пово-
d - відстань між задніми колесами енергетичного та коле-
(1)
Рисунок 1 – Розрахункова схема сил діючих та МЕЗ в поздовжньо-
1) Na +Y − Gт +Nв =0
де Gт, a т - вага ЕМ та координата його центру мас;
2) сума моментів відносно точки В ΣМ (в)=0;
L - база енергетичного модуля МЕЗ, м;
роту заднього начіпного пристрою ЕМ МЕЗ, м;
вертикальній площині 65
1) сума сил на вісь ординат ΣY=0;
сами технологічного модулів МЕЗ, м.
ЕМ відповідно;