2 КІНЕМАТИЧНИЙ ТА СИЛОВИЙ РОЗРАХУНОК ПРИВОДА
2.1 Загальний коефіцієнт корисної дії
привода
Загальне
значення к.к.д. привода обчислюється таким чином
 (2.1)
(2.1)
де ηгз – к.к.д.
передачі гнучким зв’язком;
ηз
– к.к.д.
зубчастої
передачі;
ηпп–
к.к.д.
пари підшипників;
ηм – к.к.д.
з’єднувальної
муфти.
Середні
значення к.к.д. передач різних типів з урахуванням втрат в опорах валів на
підшипниках кочення наведено у
додатку Б.
Вибір типу електродвигуна
провадиться з урахуванням умов роботи привода. При виконанні курсового проекту
рекомендується вибирати трифазні асинхронні двигуни серії 4А, які
характеризуються простотою конструкції, невеликою вартістю та високою
експлуатаційною надійністю.
Електродвигун,
який буде приводити в рух вхідний вал редуктора, вибирають з числа трифазних
асинхронних, які найчастіше використовують з редукторами будь-якого призначення.
Можна також скористатися 2D-ресурсом системи КОМПАС – «Библиотека
электродвигателей» і вибрати
в її меню тип двигуна: двигуни
«Переменного
тока трехфазные», а згодом
опцію «Асинхронные
общего применения» (це треба
робити у відкритому файлі програми КОМПАС типу «Чертеж»
або «Фрагмент»). Параметри двигунів найпоширенішої серії 4А наведено
у додатку В.
Під час
вибору двигуна потрібно пам'ятати, що його завищена потужність призводить до
зростання реактивного опору в електромережі й знижує значення cos φ.
Водночас допустиме перевантаження електродвигуна становить від 5 до 8% за його
постійної величини та в межах 10…12 % від номінальної при змінних навантаженнях.
Відповідну модель вибирають з довідкової літератури за номінальною потужністю
двигуна і синхронною частотою обертання його вала або з бібліотеки КОМПАС (рис.
2.1).
Після цього
в пояснювальну записку заносять такі характеристики
електродвигуна:
–
позначення;
–
номінальну потужність, кВт;
–
синхронну частоту обертання вала, хв–1;
–
відношення пускового моменту до номінального;
–
габаритні розміри, мм;
–
тип, діаметр і довжину вихідного кінця вала (якщо наведені),
мм;
– точну
(асинхронну) частоту обертання n1,
яку знаходять, наприклад, у колонці «Точная
частота вращения»
бібліотеки електродвигунів програми КОМПАС чи у додатку В.
Ескіз
електродвигуна з основними розмірами подають у пояснювальній записці, як це,
наприклад, показано на рисунку 2.2 для двигуна АИР56А4, потужністю 12 кВт,
синхронною частотою 1500 хв–1, масою
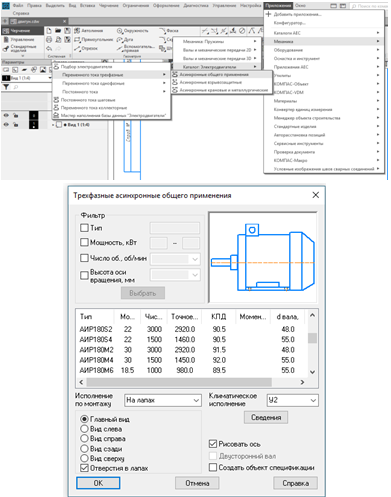
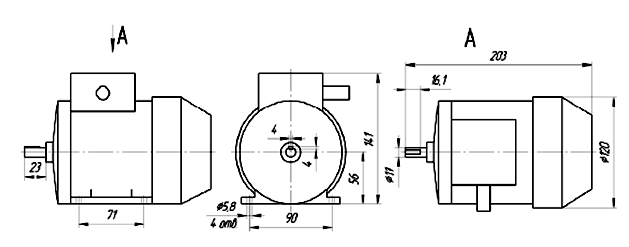
Рисунок 2.2
– Ескіз двигуна АИР56А4
2.3
Загальне передаточне число привода
На
будь-якому етапі роботи окремі елементи компонування можуть бути переглянуті й
змінені, оскільки студент має вибрати найбільш раціональний варіант виконання
проекту.
Використовуючи
дані з варіанта завдання, заздалегідь визначають загальне передаточне число
привода як відношення частот обертання вхідного (швидкохідного) і вихідного
(тихохідного) валів, тобто
 (2.2)
(2.2)
де
nед ,
n –
частота обертання вхідного (синхронна частота двигуна) і вихідного валів
відповідно, хв–1.
2.4 Розподіл
передаточного числа
привода на
ступіні
Загальне
передаточне число
привода має бути
розподілене на ступіні. Передаточний механізм привода транспортера, згідно
схеми, складається з передачі гнучким зв’язком та циліндричного редуктора. У
багатоступіневих редукторах загальне передаточне число
дорівнює добутку передаточних чисел ступіней, що його утворюють. Зокрема для
двоступіневого редуктора
 (2.3)
(2.3)де uШ, uТ –
передаточні числа
швидкохідної і тихохідної ступіні, відповідно.
Значення
передаточних чисел
для передач різних типів повинні бути в допустимих межах, поданих у додатку Г, у
таблиці Г1. Передаточні
числа швидкохідної і тихохідної ступіні двоступінчатих редукторів різних видів
визначають використовуючи вирази, подані у додатку Г, у таблиці
Г2.
Проектуючи
циліндричні передачі, необхідно також особливу увагу приділяти максимальному
значенню передаточного
числа однієї ступіні залежно від твердості зубців коліс, з огляду на
рекомендації, подані в таблиці 2.1.
Таблиця 2.1
– Найбільші значення передаточних чисел в одній ступіні циліндричних
передач
|
Тип
передачі |
Твердість |
umax |
|
Тихохідна
і проміжна у всіх редукторах |
НВ
≤
350 НВ
>
350* HRC
>
56 – 63 |
6,3 6,3 5,6 |
|
Швидкохідна
у всіх редукторах, окрім співвісних |
НВ
≤
350 НВ
>
350* HRC
>
56 – 63 |
8,0 7,1 6,3 |
|
Швидкохідна
в співвісних редукторах |
НВ
≤
350 НВ
>
350* HRC
>
56 – 63 |
10 9 8 |
|
Відкрита |
НВ
≤
350 |
25 |
|
* Ця
твердість не повинна перевищувати HRC56 | ||
Слід ураховувати, що
передаточні числа зубчастих передач повинні відповідати ГОСТ 2185-66, а
передаточні відношення передач гнучким зв`язком не повинні мати значень, які
виходять за рекомендовані межі (для пасових і = 2…4, для ланцюгових і = 1,5…4)
[2].
Розподіл загального
передаточного числа по ступіням привода проводять у такій
послідовності.
Загальне передаточне число
привода є добутком передаточних чисел передач, які входять в його кінематичну
схему.
Для прикладу, що
розглядається
 (2.4)
(2.4)де іГЗ – передаточне відношення передачі
гнучким зв’язком (для прикладу, що розглядається – пасової
передачі);
uШ і
uТ –
передаточні числа, відповідно, швидкохідної і тихохідної ступіні зубчастих
передач редуктора.
Необхідно прийняти
попередньо передаточне відношення передачі гнучким зв`язком в межах
і¢ГЗ = 1,5…2,5 (значення і¢Г.З < 1,5 недоцільні, а і¢ГЗ > 2,5 можуть привести до неспіврозмірності елементів
привода і збільшення його габаритів).
2.5 Визначення передаточного числа
редуктора
Попереднє передаточне число
редуктора
 (2.5)
(2.5)
Результат розрахунку слід
звірити з передаточними числами, що рекомендуються для редукторів різних типів
(додаток Г). У випадку неспівпадання передаточного числа редуктора із
значеннями, що рекомендовано, потрібно перерахувати його, змінивши і¢Г.З.
У відповідності з даними
додатку Г вичислити передаточне число швидкохідної ступіні і прийняти стандартні
значення цих передаточних чисел по додатку Г.
2.6 Частота обертання та кутові швидкості валів
привода
Слід
підрахувати частоту обертання та швидкість на кожному валі привода.
Частота обертання будь-якого
вала знаходиться як відношення
частоти обертання вхідного вала до передаточного числа наступної
пари
 (2.6)
(2.6)
Кутова швидкість вала знаходиться за відомою
формулою
 (2.7)
(2.7)
Для
перевірки можна порівняти результати розрахунків порівнявши числові значення
вихідного та вхідного валів nIV
≈
n (у межах точності
обчислювань).
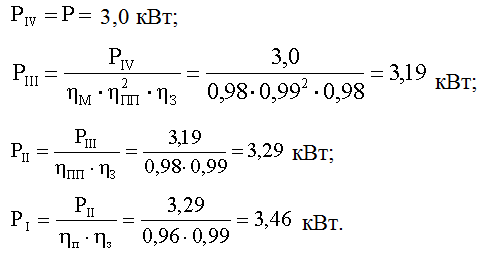
2.7 Потужності на валах привода
Потужності (у кВт) на валах привода різняться на
величину к.к.д. кожної ступіні
 (2.8)
(2.8)
Для перевірки можна
порівняти числові значення Р1 ≈ Р2 (у межах точності
обчислювань).
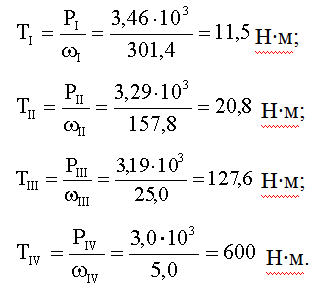
2.8
Обертаючі моменти на валах привода
Обертаючі моменти
(Н×м) на валах привода можна знайти
за формулою
 (2.9)
(2.9)1
Наведіть приклад одного з варіантів компонувальної схеми циліндричного
двоступіневого редуктора.
2
Запишіть кілька формул для розрахунку передаточного числа редуктора та поясніть
фізичний зміст цієї величини.
3
Якими принципами керуються, вибираючи електродвигун для
редуктора?
4
Що таке синхронна частота обертання асинхронного двигуна?
5
Яким чином зображується ескіз електродвигуна в системі
КОМПАС?
6 Що таке передаточне число?
7 Як змінюються від ведучого
до веденого вала такі характеристики передачі як потужність, обертаючий момент,
частота обертання?
8 Яке співвідношення між
потужностями двигуна Р1 і робочого органа
Р2?
9 Яке співвідношення між
обертаючими моментами двигуна Т1 і робочого органа Т2, між
кутовими швидкостями двигуна w1 і робочого органа
w2?
10 Як можна визначити обертаючий момент на валі Т, Н×м, знаючи потужність Р, Вт, і кутову швидкість w, рад/с, на цьому валі?
Приклад
розрахунку
Кінематичний та силовий розрахунок привода стрічкового
транспортера
Задача розрахунку. Визначити
загальний к.к.д. привода, вибрати електродвигун, визначити передаточні числа
ступіней привода, кінематичні параметри елементів привода.
Вихідні дані:
- потужність на
веденому валі Р = 3,0
кВт;
- кутова швидкість
веденого вала w = 5,0
рад/с;
- синхронна частота обертання електродвигуна
n = 3000
об/хв.
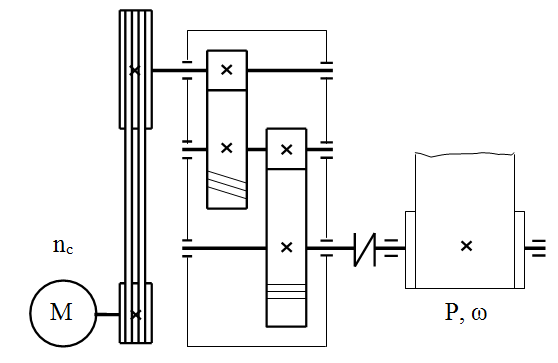
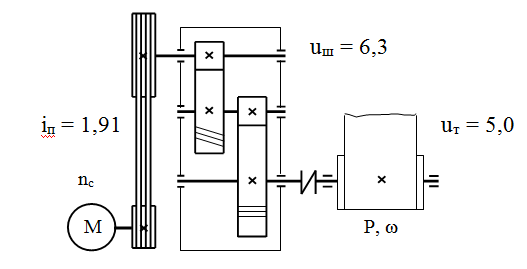
Рисунок 1 – Кінематична схема
привода
1 Загальний
к.к.д. привода
hзаг = hп×hз2×hпп4×hм,
(1)
де hп – к.к.д. пасової передачі,
hп = 0,96;
hпп – к.к.д. пари
підшипників, hпп = 0,99;
hз – к.к.д. зубчатої пари,
hз = 0,98;
hм – к.к.д. муфти, hм = 0,98.

2 Потрібна потужність
електродвигуна
 (2)
(2)
де Р – потужність на веденому
валі, кВт.
3 Вибір
електродвигуна
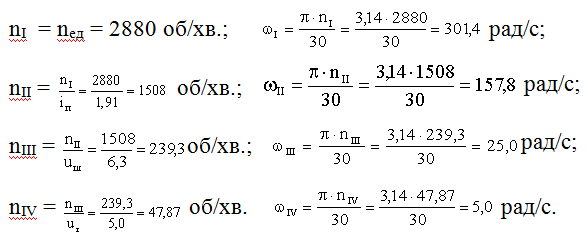
Вибираємо електродвигун 4А100S2 потужністю
Ред = 4,0кВт, частотою обертання
nед = 2880 об/хв.
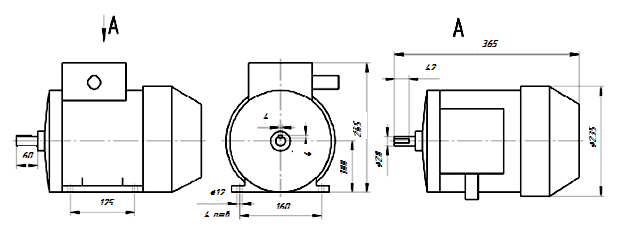
Рисунок 2 –
Ескіз двигуна 4А100S2
4 Загальне передаточне
число привода
(3)
де n – частота обертання веденого
вала
 (4)
(4)5
Розподіл передаточного числа по
ступінях
Приймаємо попереднє
передаточне відношення пасової передачі іп'
= 2 .
Попереднє значення передаточного числа
редуктора
(5)
Розрахункове передаточне число швидкохідної
ступіні
 (6)
(6)

Приймаємо стандартне значення uш =
6,30.
Розрахункове передаточне число тихохідної
ступіні редуктора
 (7)
(7)

Приймаємо стандартне значення uТ =5,0.
Тоді передаточне число редуктора
uред = uш ∙ uТ;
(8)
uред = 6,3∙5,0 =
31,5.
Фактичне передаточне відношення пасової передачі
 (9)
(9)

6 Частоти обертання і кутові швидкості валів привода
7 Потужності на валах
привода
8
Обертаючі моменти на валах
Рисунок
3 – Результати кінематичного і
силового
розрахунку
привода
Таблиця 1 – Результати кінематичного і
силового розрахунку привода
|
Вал |
Числові значення
параметрів | |||
|
Потужність Р, кВт |
Кутова швидкість, рад/с |
Частота обертання
n, об/хв. |
Обертаючий момент
Т, Н·м | |
|
I |
3,46 |
301,4 |
2880 |
11,5 |
|
II |
3,29 |
157,8 |
1508 |
20,8 |
|
III |
3,19 |
25,0 |
239,3 |
127,6 |
|
IV |
3,0 |
5,0 |
47,87 |
600 |
Висновок по розділу: з урахуванням загального к.к.д. привода вибрано електродвигун 4А100S2, загальне передаточне число привода 60,29 розподілено проміж пасовою передачею (іпас = 1,91) та двоступінчастим циліндричним редуктором (uред = 31,5). Значення кінематичних та силових параметрів, які одержано в результаті розрахунків, приведено на рисунку 3.