ТЕХНОЛОГІЇ ТОЧНОГО ЗЕМЛЕРОБСТВА
Системи
паралельного водіння; системи управління нормою
Розповідаючи
про систему точного землеробства, розуміємо, що це - підвищення використання
генетичного потенціалу рослин, раціональної експлуатації техніки.
Для
досягнення даної мети необхідно впровадити такі складові, як систему
паралельного водіння агрегатів, зондування ґрунту і картографування врожайності
та диференційоване внесення добрив.
Зупинимося
на системі паралельного водіння , що схематично зображено на рис.
6.1.
Точне
управління сільським господарством починається з точного управління с.- г.
машинами: «Бажаєте отримати економію - їдьте
прямо!»
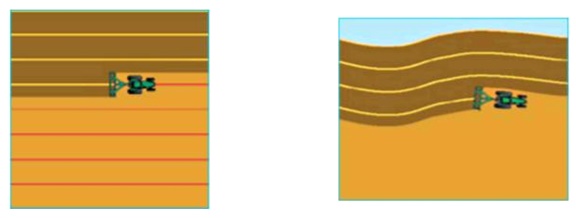
Рисунок – Паралельний рух агрегату
Яскравим
прикладом вищенаведеного твердження послужить розгляд операції внесення
мінеральних добрив. На рисунку 6.2 зображено схему розподілу добрив по поверхні
поля. Як бачимо, тільки вірно вибраний суміжний прохід дасть рівномірну норму
внесення добрив. А відхилення від рівномірної норми внесення мінеральних добрив
має значний вплив на врожайність запланованої культури.
Як
відомо, при русі агрегату присутні перекриття і огріхи, звідси і відхилення від
норми внесення.
Системи
паралельного водіння призначені в першу чергу для високоточного водіння
сільськогосподарської техніки по заданому маршруту в межах поля. Головна ідея
полягає в тому, щоб звести до мінімуму перекриття й пропуски між сусідніми
загінками й при цьому зробити витрати тільки на обладнання й швидке
навчання.
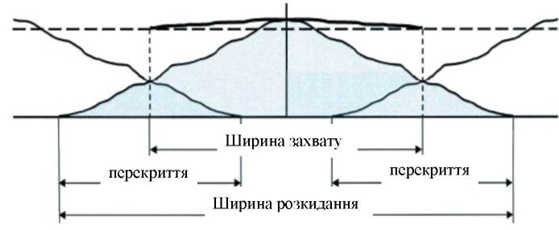
Рисунок
– Співвідношення між шириною захвату розкидача та шириною розкидання
добрив
Завдання,
які вирішують системи паралельного водіння: - економія добрив, засобів захисту
рослин, насіння, палива та інших засобів виробництва за рахунок скорочення
ширини смуги подвійної обробки (смуга між двома суміжними проходами
техніки);
- підвищення
інтенсивності використання
сільськогосподарської техніки, що є в господарстві (з'являється можливість
високоякісної роботи в нічну зміну, в туман або дим) і продуктивності
праці;
- паралельне водіння по приладах дозволяє
поліпшити якість і оперативність виконання технологічних операцій;
- зниження втомлюваності
механізатора.
За
рахунок усіх вищеназваних чинників система паралельного водіння окупає себе при нормальному
завантаженні трактора вже на першій технологічній операції, виконаної із
застосуванням даного обладнання. Це є причиною великої популярності систем
паралельного водіння останнім часом.
Як
працює звичайна система паралельного водіння:
- встановлюється електронний маркер (його можна
легко знімати і монтувати);
- механізатор виїжджає в поле;
- включається система паралельного водіння одним
натисканням кнопки або перемиканням важеля;
- вводиться ширина захвату агрегату,
встановленого на трактор
(пам'ять курсопоказника
дозволяє ввести цю інформацію
один раз);
- електронний маркер збирає
інформацію
про розташування супутників (це може тривати 1-5 хвилин, якщо прилад вже
включали в цій області або 5-20 хвилин, якщо засіб паралельного водіння (ЗПВ)
вперше працює в даному регіоні. Як правило, про стан сигналу свідчать
індикатори: червоний - занадто мало інформації, щоб визначити місце розташування
і працювати, жовтий - прилад працює з точністю, що надається системою GPS,
зелений - в роботі приладу враховується диференціальна поправка GPS даних. Після
того, як загорівся зелений (гірше, якщо жовтий) індикатор, система паралельного
водіння готова до роботи;
- механізатор фіксує точку початку руху
(обробки), натиснувши на кнопку «А»;
-
наприкінці
гону або на відстані мінімум 30 метрів від точки «А» фіксується точка
«Б»;
-
комп'ютер
системи паралельного водіння будує у своїй пам'яті лінію, що сполучає точки «А»
і «Б». Відразу після цього електронний маркер створює в пам'яті маршрути,
паралельні базовій лінії, на відстані ширини захвату агрегату (все це
відбувається миттєво). Важливо зазначити, що маршрути можуть бути як кривими,
так і криволінійними;
- тепер механізатор може обробляти все поле,
орієнтуючись на лампочки чи карту, де фіксується напрямок і значущість
відхилення трактора від маршруту, закладеного електронним маркером.
Обладнання, що
використовується в при паралельному водінні агрегатів. Поняття точності
позиціювання МТА
Як
приклад розглянемо прилад для паралельного водіння Leica
mojo
Mini,
країна виробник - Швейцарія
Прилад
має функції системи паралельного водіння і навігатора для автомобіля з докладною
картою доріг.
Характеристики
приладу:
- точність роботи курсопокажчика з поправкою
15...30 см;
-
чотири режими водіння (паралельне водіння
по прямій, однонаправлений рух по кривій, рух по спіралі, введення напряму для
здійснення руху);
-
кольоровий
одинадцяти сантиметровий екран дозволяє робити керування приладом шляхом
натиснення на екрані пальцем або стилусом;
-
розрахунок
обробленої площі поля;
- повнофункціональний GPS-навігатор для
автомобіля (докладна карта України, прокладка маршрутів, голосове попередження
про повороти тощо);
-
меню
для роботи повністю переведене на російську мову;
-
високоточна
GPS-антена сполучається з основним блоком по бездротовому зв'язку Bluetooth
(немає необхідності тягти додаткові дроти в салон
трактора);
- в основному блоці приладу є акумулятор, який
дозволяє приладу працювати 2 години без зовнішнього живлення;
-
крім
антени в основний блок вбудований GPS-приймач
(для роботи автомобільного навігатора не обов'язкова зовнішня
антена);
-
курсопокажчик
одночасно показує напрямок руху і на тривимірній карті за допомогою емулятора і
лампочок на екрані дисплея відображається оброблена площа.
Система
приладу складається з:
-
основного
блоку з вбудованим GPS-приймачем;
-
кронштейну
з присоскою для кріплення основного блоку;
-
зарядного
пристрою основного блоку;
-
карти
пам'яті SD;
-
GPS-приймач;
-
набору
проводів.
На
сьогодні ринок наповнений великою кількістю приладів для паралельного водіння,
розглянемо деякі з них:
AgroTrek
navi
Даний
прилад має такі функції:
-
-
замальовка
обробленої площі іншим кольором;
-
кольоровий
екран 4,3";
-
точний
і надійний GPS приймач на базі обладнання Holux;
-
прорахунок
обробленої площі і пройденої відстані при водінні;
-
повноцінна
оригінальна система Агрометр в комплекті для виміру та обліку
полів;
-
голосові
та екранні підказки при водінні;
-
можливість
повернутися до місця, де була закінчена робота і продовжити
водіння;
-
автомобільна
навігація і карти України в комплекті;
-
кріплення
на лобове скло;
-
зарядний
пристрій від мережі ( 220В ) і прикурювача 12В, 24В;
-
можливість
роботи автономно без електричної мережі (до 6 годин).
Trimble
EZ-Guide 250
-
точність
проходу по сусідніх рядах: ±
-
різні
типи безкоштовної корекції;
-
можливість
роботи з автопілотом;
-
російська
мова;
-
кольоровий
дисплей;
-
можливість
запису треку на USB-флеш (формат даних: shp).
Аналізуючи
наведену інформацю, можно говорити, що навігаційна система призначена для
точного паралельного водіння трактора при внесенні добрив, обробці засобами
захисту рослин, працює на основі прийому супутникових сигналів, встановлюється
за лічені хвилини на всі типи тракторів.
Забезпечує:
-
збільшення
продуктивності техніки на 13-20 %;
-
контроль
над виконаними роботами;
-
роботу
на безкоштовних супутникових сигналах;
-
точність
15-
-
сумісність
з будь-якими тракторами;
-
простоту
і надійність у використанні;
-
навчання
займає не більше 15 хвилин;
-
живлення
від бортової мережі трактора 9-36 вольт;
-
робота
вночі і в будь-яких умовах видимості;
-
зниження
втомлюваності механізатора;
-
відсутність
необхідності в залученні сигнальників і сівачів.
Поняття
точності позиціювання.
Основна
проблема супутникової навігації мобільних сільськогосподарських агрегатів
пов'язана з питанням точності визначення координат МТА в полі.
Яка
потрібна точність для використання навігації в аграрному
виробництві???
Точність
GPS, необхідна для точного землеробства часто обговорюване питання. Чи потрібна
сантиметрова точність позиціонування при картуванні урожайності кукурудзи?
Можливо, достатньо точності в межах ± 5 метрів? При рекламі систем DGPS акцент
робиться насамперед на точність позиціювання, що досягається при проведенні
польових робіт. Провайдери сигналу диференціальної корекції встановлюють
вартість своїх послуг виходячи з величини похибки, що досягається при
використанні їх сигналу. При рекламуванні даних сервісів часто використовують
різні абревіатури, такі як CEP, RMS і 2DRMS. Що ж насправді означає термін
"точність"?
Здатність
встановити місцерозташування на місцевості в межах декількох сантиметрів
(“сантиметрова точність”) являється критично важливою при картуванні
розташування наземних мін и фугасів, при геодезичній зйомці або при
автоматизованому керуванні рульовими механізмами тракторів и комбайнів. Похибка
позиціювання в межах одного метра (“субметрова точність”) прийнятна для
більшості технологій точного землеробства.
Використання
сантиметрової точності позиціювання при виконанні більшості агротехнічних
заходів з використанням технологій точного землеробства не завжди економічно
обґрунтоване. Для більшої частини сільськогосподарських машин точності
позиціонування, у межах кількох метрів цілком достатньо.
Крім
необхідного рівня точності позиціювання, ми повинні розуміти,
що технічні характеристики точності GPS спираються на
статистичні методи і термінологію, що ставиться до щільності розподілу та
ймовірності.
Через
властиві глобальній системі позиціювання похибки (супутник, атмосфера, приймач і
т.д. - про них піде мова пізніше), навіть стаціонарний БОР8-приймач, що видає
щосекунди потік даних, не гарантує абсолютно точне позиціонування. Деякі із
значень досить близькі до дійсних, інші значно від них відрізняються. Таким
чином, статистика і точність позиціонування йдуть поруч.
Більшість
статистичних вимірювань точності ОР8 ґрунтуються на твердженні, що похибки в
позиціонуванні випадкові по своїй природі, і частота повторюваності даних
помилок підлягає принципу нормального розподілу.
Одним з
визначень точності,
що
іноді використовуються для характеристики положення нерухомої точки на
місцевості, є круговий розподіл помилок (CEP). Цей термін має
відношення до передбачуваних координат точки в горизонтальній площині і
найкращим чином описується наступним прикладом. Уявімо, що ви перебуваєте в
точці з відомими точними координатами. Якщо використати GPS-приймач
для визначення координат даної точки, то при кожному з вимірів будуть отримані
різні значення, що знаходяться в певних межах. Записуючи кожне з певних значень
і відкладаючи їх на графіку, зрештою, ви отримаєте схему, подібну наведеній
нижче. Розподіл отриманої помилки буде випадковим. Іншими словами, із 100
зафіксованих точок 50 будуть відкладені на північ від позначки з істинними
координатами, і 50 будуть знаходитися південніше (те ж саме буде і з розподілом
схід-захід). Розподіл координат точки, що визначені точним приймачем буде
щільним навколо точки з дійсними координатами. Менш точний приймач дасть набір
точок з більш широким розподілом. СЕР - це найменший радіус кола, в межах якого
зосереджено 50% передбачуваних координат точки, обчислених за допомогою GPS.
Наприклад, якщо 50% обчислених GPS
координат (протягом тривалого періоду часу) знаходяться на відстані

Рисунок
- Круговий розподіл помилки - це коло, всередині якої знаходиться 50%
очікуваних
координат
точки
Для
характеристики точності обчислення координат навігаційними системами також
використовують статистичний показник середньоквадратичного відхилення (СКВ)
вимірювань від істинних координат, який характеризує процент вимірів координат,
що попали у зазначений показник точності.
Часто
виможете зустріти такий термін, як RMS (корінь з квадрату середнього,
позначається σ) і 2DRMS
(подвоєний корінь з квадрату середнього, 2σ). Згадане скорочення RMS, приблизно
еквівалентне статистичному терміну середньоквадратичне відхилення (SD). Величина
SD характеризує розмах щільності розподілу. На малюнку нижче наведені дві кривих
нормального розподілу: одна - з великим SD, інша - з маленьким.
Невелике
значення SD характеризує щільний розподіл (більше точок знаходиться ближче до
середнього, дійсного значення). І навпаки, більше 8Б означає широку дисперсію
(більше точок знаходиться далі від дійсного значення).
Наприклад,
якщо указано, що точність обчислення координат складає
Джерела
помилок та удосконалення глобальних систем позиціонування.
Незважаючи
на використання вкрай складних технологій і значні фінансові витрати на
створення системи GPS, її точність все дуже схильна до впливу різних джерел
помилок. Деякі джерела "помилок" є невід'ємною частиною системи і їх називають
системними. Вони включають:
1.
Неточне визначення часу. Нібито
незначні помилки у вимірі часу можуть викликати помітні помилки при визначенні
координат об'єкта. Наприклад, так як сигнали супутників NAVSTAR поширюються зі
швидкістю світла і дальнометрія заснована на вимірюванні часу проходження
сигналу, похибка годинника в одну мілісекунду може призвести до помилки у
визначенні координати в
2.
Помилки обчислення орбіт. Супутники
знаходяться на високій орбіті, і атмосфера Землі не може чинити на них впливу.
Однак такі явища природи, як сила гравітації Місяця і Сонця, так само як і тиск
сонячної радіації ("сонячний вітер"), створюють незначні помилки у визначенні
висоти орбіти супутників, їх координат і швидкості. З часом ці помилки
накопичуються, стаючи більш суттєвими.
З'являються
неточності прогнозу і розрахунку ефемерид супутників, що виконуються в апаратурі
приймача. Ця погрішність також носить систематичний характер і приводить до
помилки вимірювання координат близько
3.
Багатошляховість розповсюдження сигналу. З'являється
в результаті вторинних віддзеркалень сигналу супутника від крупних перешкод,
розташованих в безпосередній близькості від приймача. При цьому виникає явище
інтерференції, і зміряна відстань виявляється більшою дійсної. Аналітично дану
похибку оцінити достатньо важко, а найкращим способом її компенсації є
раціональне розміщення антени приймача щодо перешкод. В результаті дії цього
чинника помилка визначення псевдодальності може збільшитися на
4.
Іоносферні затримки сигналу. Іоносфера
- це іонізований атмосферний шар в діапазоні висот 50 -
Наша
атмосфера уповільнює і переломлює (відхиляє) радіосигнали з супутників. Ці
затримки в основному відбуваються в іоносферній оболонці Землі, що складається з
електрично заряджених частинок на висоті 80-
Моделювання
впливу іоносфери зазвичай дозволяє врахувати тільки 50% помилки. Вплив іоносфери
пропорційний концентрації електронів в іоносфері і квадрату частоти GPS сигналу.
Саме через це були розроблені двох частотні GPS-приймачі, здатні розрахувати
передбачуваний Р-код для кожного з сигналів, L1 і L2, для того, щоб визначити
вплив іоносфери. Двочастотні приймачі більш точні в порівнянні з одночастотними
через послаблення впливу іоносфери на точність визначення координат.
Крім
того, для часткової компенсації цієї похибки може бути використана модель
корекції, яка аналітично розраховується з використанням інформації, що міститься
в навігаційному повідомленні. При цьому величина залишкової немодельованої
іоносферної затримки може викликати похибку визначення псевдодальності близько
5.
Тропосферні затримки сигналу. Тропосфера
- самий нижній від земної поверхні шар атмосфери (до висоти 8 -
6.
Геометричне розташування супутників.
На
точність визначення координат за допомогою GPS і DGPS впливати також і
розташування (геометрія) супутників в просторі. "Гарний" розподіл супутників
означає, що вони рівномірно розташовані на небсхилі. Точки перетину уявних сфер
легко встановити, коли відстежуються супутники широко розкидані в просторі.
"Поганий" розподіл супутників означає, що вони щільно зосереджені в якійсь
певній ділянці небосхилу в межах прямого пройму GPS-приймача. Якість геометрії
супутників і величина похибки позиціонування описуються терміном геометричне
пониження точності (GDOP).
7.
Існує ще одне штучне джерело
помилок - так звана селективна (виборча) доступність (S/А).
Це технологія, що використовується міністерством оборони США з метою
перешкоджання більшості цивільних користувачів в повній мірі використовувати
точність системи GPS. У сигнал супутників вводиться випадкова помилка. 2 травня
2000 року використання S/A було завершене. Уряд США не має наміру надалі
використовувати S/A з тієї причини, що існують інші методи запобігання
використанню GPS проти самих же збройних сил США. Проте досі GPS супутники мають
можливість впроваджувати S/A свій сигнал. Помилка може сягати
8.
Інструментальна
помилка приймача Обумовлена,
перш за все, наявністю шумів в електронному тракті приймача. Відношення
сигнал/шум приймача визначає точність процедури порівняння прийнятого ССЗ і
опорного сигналів, тобто похибка обчислення псевдодальності. Наявність даної
похибки приводить до виникнення координатної помилки близько
Удосконалені
системи позиціонування
Точність
(Accuracy) визначення координат, безперечно, є найважливішим параметром ГСП. Як
правило, в характеристиках виробу вона указується для горизонтальних координат і
досить рідко - для висоти.
Для
подальшого підвищення точності визначення координат необхідне введення
додаткових поправок і вдосконалених алгоритмів. Одним з таких алгоритмів є
Differential ГСП (ДГСП) коли використовуються координати від двох ГСП-приймачів,
одного - робочого, другого - еталонного (стаціонарно встановленого в місці,
координати якого заміряні з високою точністю), і обидва пеленгують ГСП-супутники
в один і той же проміжок часу, що дає можливість обчислити поправку і довести
точність визначення координат до 0,5… 3 метрів. Так, наприклад, діє служба
берегової охорони США, яка має мережу башт, що приймають сигнали ГСП і передають
скоректовані сигнали за допомогою маякових (beacon) передавачів.
Одним
з рішень, що підвищує точність позиціонування систем GPS і ГЛОНАСС на земній
поверхні або в навколоземному просторі, є супутникова система диференціальної
корекції, що забезпечує певну територію даними диференціальних поправок, що
транслюються з геостационарного супутника. На сьогоднішній день створено три
таких супутникових системи, що транслюють диференційний сигнал вільного доступу,
які отримали загальну назву SBAS - Space Based Augmentation System ("Уточнюючі"
системи космічного базування).
Роботу
системи широкозонного диференціального сервіcу
можна представити таким чином. Базові станції моніторингу системи (RIMS)
визначають координати кожного супутника диференціальної корекції, а також
здійснюють безперервне спостереження за всіма супутниками NAVSTAR. Далі станції
RIMS передають накопичену інформацію на контрольні станції системи (MCC). На
станціях MCC формуються диференціальні поправки і відбувається обчислення
точності сигналів навігаційних систем прийнятих усіма станціями моніторингу та
похибок визначення їх координат внаслідок впливу іоносфери. Потім обчислені
поправки передаються на навігаційні станції передачі даних, рівномірно
розташовані на території, що обслуговується. Ці станції використовуються для
закладки навігаційної інформації та управління геостаціонарними супутниками.
Після цього поправки передаються на геостаціонарні супутники і стають доступні
користувачам GPS-приймачів на частоті L1 GPS з модуляцією і кодуванням за
зразком GPS-сигналу. Сигнали є безкоштовними і приймаються практично усіма GPS
приймачами, включаючи кодові (навігаційні). Ці системи допомагають підвищити
точність позиціонування до ± 1…
Система
WAAS
- це перша супутникова система диференціальної корекції вільного доступу на
території США. В даний час система WAAS забезпечує диференціальним сервісом
території Канади і Мексики і значну частину акваторії Тихого Океану.
Система
WAAS містить більше 20 базових станції (WRS), розташованих на всій території
Сполучених Штатів. Кожна їх станція обладнана GPS апаратурою і спеціальним
програмним забезпеченням, призначеним для прийому GPS сигналів, аналізу
отриманих вимірювань, обчислення помилок іоносфери, відхилень траєкторій і годин
супутників. Ці дані передаються на центральну станцію управління (Master Station
- WMS), де повторно обробляється і аналізуються з урахуванням вимірів, отриманих
з усіх базових станцій мережі. Потім коригувальна інформація передається на
геостаціонарні супутники і вже звідти ретранслюються користувачам.
Починаючи
з 1993 року була запущена програма EGNOS спрямована на поліпшення роботи систем
GPS на території Європи.
Система
EGNOS забезпечує підвищення точності GPS- позиціонування до ±
1-
Більш
досконалі методи визначення місцезнаходження МТА
в полі базуються на застосуванні гіроінерціальних приладів і комбінацій
приладів з ГСП, процесорних систем та гірокомпасів. Гірокомпаси
дозволяють виконувати операції не тільки з визначення координат, але і навігації
мобільних об'єктів, тобто спрямовувати їх по необхідній, наперед заданій
траєкторії руху. Точність роботи гіроінерціальних приладів підвищується, коли
відомі координати опорних (реперних) точок від яких вираховується абсолютна
позиція МТА, а також коли використовуються системи коригування показників
гірокомпасів з використанням каналів супутникової навігації.
Покращення
технічних характеристик систем позиціонування відбувається також шляхом
підвищення тактової частоти передачі навігаційної інформації від датчиків
координат до, наприклад, бортового комп’ютера, а також шляхом використання так
званих фазових датчиків координат. Це дозволяє зробити кроки в напрямку переходу
від макро-технологій ТЗ до мікро-технологій, тобто технологій з розв'язанням
просторової задачі на субметровому рівні. Особливого поштовху до цього надають
тенденції прискореного розвитку технологій реального часу кінематичного (РЧК)
ДГСП. На світовому ринку ГСП-технологій відмічається значне збільшення
номенклатурного ряду та кількості подібного обладнання.
Сканування та
аналіз ґрунту; технології метеомоніторингу
Ґрунти
-
самостійне історично сформоване органо-мінеральне природне тіло, що виникло на
поверхні Землі в результаті тривалого впливу біотичних, абіотичних і
антропогенних факторів. Складається з твердих мінеральних і органічних частинок,
води і повітря, і має специфічні генетично-морфологічні ознаки, властивості, що
створюють для росту і розвитку рослин відповідні умови.
Вперше
термін «моніторинг» (від англ. мonitoring – той, що спостерігає,
наглядає, нагадує) з‘явився на початку 70-х років ХХ століття на конференції ООН
з охорони навколишнього середовища (Стокгольм, 5-16 червня 1972 р.), де було
запропоновано організувати систему повторних спеціальних спостережень за станом
навколишнього природного середовища у просторі та часі за спеціально
підготовленою програмою.
З
часів появи терміну, по мірі ускладнення екологічних проблем, система
моніторингу довкілля незмінно удосконалювалась та трансформувалась. Цей процес
продовжується і по цей час.
Моніторинг
(за
Манном) – це система повторних спостережень одного чи більше елементів
навколишнього природного середовища у просторі та часі з визначеними цілями у
відповідності до заздалегідь підготовленої програми.
Відповідно
до цього визначення Манн Р.І. основною метою системи моніторингу є проведення
спостережень за станом навколишнього природного середовища. Це лише одне з
багатьох визначених та сформованих історично термінів, які складають основну
базу для складання поняття моніторингу.
Реймерс
М.Ф. ускладнив поняття та придав йому більш вузьке значення, поставив у центр
поняття людину. Так, за Реймерсом М.Ф., моніторинг навколишнього (людини)
середовища – це слідкування за станом навколишнього природного середовища та
попередження про критичні ситуації, шкідливі або небезпечні для здоров‘я людей
та інших живих організмів.
Відповідно
до Положення Кабінету Міністрів України «Про державну систему моніторингу
довкілля» від 30 березня 1998 р. №391, державний моніторинг довкілля
– це система спостережень, збору, обробки, передачі, збереження, аналізу
й оцінки інформації про стан довкілля, прогнозування його змін і розробка
науково-обґрунтованих рекомендацій для прийняття управлінських
рішень.
Моніторинг
ґрунтів -
це система спостережень за станом ґрунтового покриву, у тому числі ґрунтів,
розташованих у зонах радіоактивного та інших забруднень, з метою своєчасного
виявлення змін, їх оцінки, відвернення й ліквідації наслідків негативних
процесів.
Ідея
моніторингу ґрунтів походить з Америки (США, Канада), де в рамках державної
служби ґрунтів, як самостійної державної організації, виступають переважно у дві
функції управління земельними ресурсами: організація земельного кадастру
та державний контроль за використанням й охороною
земель.
Моніторинг
ґрунтів складається
із
систематичних спостережень за станом ґрунтів (зйомки, обстеження, вишукування),
виявлення змін, а також оцінки:
- стану використання угідь, полів, земельних
ділянок;
- процесів, пов'язаних із зміною
родючості ґрунтів (розвиток водної та вітрової ерозії, втрата гумусу, погіршення
структури ґрунту, заболочення та засолення та ін.), заростання
сільськогосподарських угідь, забруднення фунтів пестицидами та іншими токсичними
речовинами;
- стану берегових ліній річок, озер,
морів, заток, лиманів, водосховищ, гідротехнічних споруд;
- процесів, пов’язаних з утворенням ярів,
зсувів, сольовими потоками, карстовими, кріогенними та іншими
явищами;
-
стану ґрунтів населених пунктів, територій, зайнятих очисними
спорудами,
гноєсховищами, складами пально-мастильних матеріалів,
добрив,
гноєсховища, стоянками автотранспорту, захороненням
токсичних
промислових відходів і радіоактивних матеріалів, а також
іншими промисловим
об'єктами.
Залежно
від терміну та періодичності проведення спостереження за станом ґрунтів
поділяються на:
- базові - відомості, що фіксують стан об'єкта
спостережень на момент
початку ведення моніторингу земель;
-
періодичні - через рік і більше;
-
оперативні - фіксують поточні зміни.
Основним
завданням моніторингу ґрунтів є формування і підтримання на сучасному рівні
системи інформації про стан ґрунтового покриву, залучення його у господарське
або інше використання на певній території, а саме про зміни у стані ґрунтів,
викликаних антропогенними діями.
Для
виконання цього завдання проводиться оцінка екологічного стану ґрунтів у такій
послідовності:
-
збирання інформації про стан ґрунтів за спеціальним переліком
показників;
-
створення
банку даних;
-
аналіз
та обробка інформації;
-
порівняння
фактичних параметрів з нормативними;
-
групування
ґрунтів за категоріями згідно з нормативами (агровиробниче
групування);
- розробка заходів регулювання, адекватних
екологічному стану
ґрунтів із визначенням площ.
Інформацію
про стан ґрунтового покриву області можна отримати у таких організаціях,
як:
−
обласні
філії інституту землеустрою УААН;
−
станції
хімізації сільського господарства;
−
санепідемстанції;
−
управління
екології та охорони природи;
−
управління
земельних ресурсів;
−
управління
лісового господарства;
−
гідрогеологічні
та гідромеліоративні експедиції;
−
облводгоспи
та центри комплексного використання водних ресурсів. Об'єктом моніторингу
ґрунтів є весь ґрунтовий покрив країни,
незалежно
від форми власності на землю, тобто територій землі, які піддаються
антропогенному впливу (залученню людиною у господарське або інше
використання).
Моніторинг
ґрунтів відрізняється
від даних земельного кадастру інформаційним забезпеченням управління земельними
ресурсами, тобто фіксацією перевищення встановлених допустимих норм
антропогенного навантаження і несприятливих (критичних) ситуацій у використанні
й охороні ґрунтів щодо фонового (стандартного)значення.
Під
час моніторингу особливе значення надається контролю родючості ґрунтів за такими
параметрами:
-
зміни
запасів гумусу;
-
зміни
рН ґрунту (кислотності, лужності);
-
зміни
вмісту мікроелементів у ґрунті;
-
деградація
ґрунту на пасовищах (ущільнення, закупорення та ін.);
-
підтоплення
земельних угідь, заболочення і перезволоження земель, засолення ґрунтів,
заростання угідь чагарниками;
- забруднення ґрунту пестицидами, важкими
металами, хімічними та
радіоактивними елементами та іншими
токсикантами;
- зміни стану меліорованих земель (іригаційна
ерозія, вторинне
засолення, заболочення, надмірне осушення та
ін.).
Залежно
від призначення, моніторинг ґрунтів поділяється на загальний, оперативний і
фоновий.
Загальний, або
базовий чи стандартний, моніторинг -
це оптимальні за кількістю параметрів спостереження за використанням та охороною
ґрунтів, об'єднаних у єдину інформаційно-технологічну мережу, які дають змогу на
основі оцінки і прогнозування стану земельних ресурсів розробляти необхідні
управлінські рішення.
Загальний, або
базовий чи стандартний, моніторинг -
це оптимальні за кількістю параметрів спостереження за використанням та охороною
ґрунтів, об'єднаних у єдину інформаційно-технологічну мережу, які дають змогу на
основі оцінки і прогнозування стану земельних ресурсів розробляти необхідні
управлінські рішення.
Оперативний, або
кризовий, моніторинг ґрунтів -
це спостереження за спеціальними показниками цільової мережі пунктів-стаціонарів
за окремими об'єктами підвищеного екологічного ризику в окремих регіонах, які
визнані зонами надзвичайної екологічної ситуації, а також в районах аварій із
шкідливими екологічними наслідками з метою забезпечення оперативного реагування
на кризові ситуації та прийняття рішень щодо їх ліквідації, створення безпечних
умов для населення.
Фоновий,
або науковий, моніторинг ґрунтів -
це спеціальні спостереження за всіма складовими екосистеми "земля", а також за
характером зміни складу угідь, процесами, пов'язаними із змінами родючості
ґрунтів (розвиток ерозії, втрата гумусу, погіршення структури ґрунту,
заболочення та засолення), міграцією забруднених речовин тощо. З його допомогою
встановлюються джерела чи причини, які зумовлюють деградацію
ґрунтів.
На
сучасному етапі значний обсяг інформації, велика кількість факторів, що
впливають на формування врожаю, складність взаємозв'язків систем у
сільськогосподарському виробництві дедалі більше утруднюють вибір спеціалістом
оптимального рішення. Тому дуже важливо надати в розпорядження спеціаліста
інструментарій, використання якого допомагало б розробляти точні й своєчасні
рекомендації (технологічні дії) відповідно до конкретних умов виробництва, стану
ґрунту, посівів тощо.
При
проведенні ґрунтового обстеження, вмісту необхідних для росту і розвитку
сільськогосподарських культур елементів живлення зазвичай приділяється найбільша
увага.
Рослини
отримують більшу частину елементів живлення з ґрунту.
Під
родючістю ґрунту розуміють її забезпеченість елементами живлення,
доступними для використання рослинами. Рослинам для оптимального розвитку
необхідно велика кількість елементів живлення в різних кількостях. Ґрунти
містять елементи живлення в різних формах, деякі з них є недоступними для
рослин.
Наприклад,
ґрунти з високим вмістом карбонату кальцію зазвичай характеризуються низькою
забезпеченістю рухомими формами фосфору. Причиною цього є швидке зв'язування
доступного фосфору і переведення його в недоступну для більшої частини рослин
форму трикальційфосфату.
У
цьому випадку, незважаючи на значний вміст загального фосфору, ґрунт
характеризується низьким вмістом доступного фосфору.
Метою
проведення ґрунтового обстеження є виявлення ґрунтових факторів, що є
лімітуючими для росту рослин і отримання адекватного витратам
врожаю.
Основними
елементами мінерального живлення рослин, які надходять ґрунту, є:
• азот (N);
• фосфор (P);
• калій (K).
Інші
елементи, іноді вносяться в ґрунт у вигляді добрив, часто
називаються:
•
Вторинними
елементами живлення;
•
Мікроелементами.
Азот
(N). Для
багатьох культур оптимальне забезпечення мінеральним азотом є вирішальним
фактором отримання високого врожаю.
Калій
(К) виконує
функції, пов'язані з властивостями клітинних розчинів рослин. Це елемент, який
відповідає за транспорт поживних речовин через рослинні тканини.
Фосфор
(Р) є
важливим елементом, від наявності якого залежить якість формування та розвитку
генеративних частин рослин. Зазвичай значні кількості фосфору накопичуються в
насінні і плодах. Даний елемент вкрай необхідний для отримання якісного
посівного матеріалу.
Вторинні
поживні елементи включають кальцій (Са), магній (Mg) і сірку
(S). Кальцій стимулює розвиток кореневих систем, стебел і листя, покращує
загальний стан рослин і стійкість до хвороб. Магній необхідний для синтезу
хлорофілу. Він також відповідає за формування важливих рослинних компонентів,
таких як цукру, крохмаль і жири. Сірка міститься в протоплазмі всіх живих
рослинних клітин. Наявність адекватних кількостей сірки необхідно для синтезу
білків, активного росту і розвитку, стійкості рослин до знижених
температур.
Однією
з найважливіших умов отримання запланованої врожайності є кваліфіковане
проведення ґрунтового обстеження на вміст доступних форм поживних елементів і
рН ґрунтового розчину.
рН
характеризує
величину кислотності ґрунтового розчину. Низькі величини рН вказують на
те, що в ґрунтовому розчині міститься велика кількість іонів водню
(Н+), Тобто ґрунт має високу кислотність. Ці іони здатні взаємодіяти
з поживними речовинами ґрунту і переводити їх у малодоступні для рослин форми.
Для нейтралізації низькою рН необхідно проводити вапнування
ґрунту.
Забезпеченість
поживними речовинами і величина рН всього два з багатьох факторів,
що впливають на врожайність сільськогосподарських культур. Фермери повинні
оцінювати й інші, не менш важливі є характеристики ґрунтового покриву при
використанні технологій точного землеробства. Нижче наведено перелік деяких з
ґрунтових характеристик, що впливають на продуктивність культур:
•
Вміст
у ґрунті органічних речовин (ОР);
•
Гранулометричний
склад (вміст фізичного піску і фізичної глини);
•
Структура
- щільність і розпушеність;
•
Ємність
обмінних катіонів (ЄОК);
•
Топографія
місцевості і ухил;
•
Система
обробки ґрунту;
•
Дренаж;
•
Потужність
гумусного шару;
Концепція
неоднорідності За
своїми біологічними, хімічними, фізичними властивостями ґрунт у природних умовах
поля неоднорідний як для великих площ, так і в межах одного конкретного поля.
Відповідно до викладеного можна дійти висновку: якщо замість середніх
(інтегрованих) норм розподілу технологічних матеріалів (ТМ) (добрив, засобів
захисту рослин, насіння) користуватись адаптованими (диференційованими) до
кожної ділянки поля, можна досягти, якщо не збільшення врожайності, то у
крайньому разі, гарантувати той самий рівень при зниженні матеріальних витрат.
Адаптація технологічних операцій відповідно до особливостей ґрунтових умов у
межах окремо взятої елементарної ділянки обумовлює не лише економічні, а й
екологічні вигоди процесу виробництва сільськогосподарської
продукції.
Ведення
господарства відповідно до потенціалу окремої ділянки вимагає наявності точних
базових даних про реальний стан ґрунту: запаси поживних речовин, кислотність,
вміст гумусу та інших показників.
Основним
методом встановлення реального стану ділянки є агрохімічний аналіз ґрунту. Проте
важливу роль у встановленні потенціалу ділянки має не лише якість проведення
аналізу, а й якість відбору ґрунтових зразків: кількість одиничних проб, їх
розміщення на площі ділянки та встановлення положення точок
відбору.
Види
моніторингу ґрунтів та угідь:
1)
Дистанційне зондування Землі (ДЗЗ) - віддалений моніторинг за
допомогою обладнання, що
встановлене на пілотованих та
безпілотних космічних об'єктах;
2)
Моніторинг стан ґрунту і
рослин на різних стадіях їх
росту з повітря за допомогою пілотованих та безпілотних літаків, гелікоптерів,
повітряних куль тощо;
3) Близький моніторинг за
допомогою об'єктів наземного
базування.
Недоліки
дистанційного зондування Землі (ДЗЗ).
В даний час застосування даних ДЗЗ для вирішення практичних сільськогосподарських завдань знаходиться в
початковій фазі свого комерційного використання.
Це пов'язано, перш за
все, з високою вартістю даних ДЗЗ і
низькою достовірністю
інформації, через те що процес реєстрації змін параметрів електромагнітного випромінювання екстер'єрних та
інтер'єрних
характеристик поля залежить від цілого ряду факторів, таких як:
- зміна оптичних властивостей грунту, які
залежать від типу грунту, його вологості,
наявності на поверхні рослинних решток та
стан їх перегнивання, ступеня і виду обробітку
грунту;
- зміна оптичних властивостей фітоценозів протягом вегетаційного періоду;
- зміна екстер'єрних характеристик фітоценозів - густина стояння рослин, площа покриття ґрунту рослинами, площа листової поверхні, орієнтація елементів рослин до
сторін світу;
- природно-кліматичні умови зйомки;
- стан атмосфери за
характером розсіювання випромінювання, що обумовлено наявністю і
розмірами присутніх в
атмосфері частинок (пилові
частинки, молекули газів, аерозолі, краплі води тощо);
- просторові умови зйомки: висота зйомки, кут розташування оптичної вісі приладу до
горизонту,
співвідношення прямої і
розсіяної радіації, час зйомки (розташування сонця), тощо.
Є всі підстави вважати, що
у міру появи супутникових систем нового покоління (з вищим просторовим і
тимчасовим дозволом) і
з виходом все більшої кількості компаній на
ринок надання послуг ДЗЗ, ситуація на
ринку технологій ТЗ мінятиметься убік більш широкого їх
застосування.
Методи
близького моніторингу:
1)
Традиційний
(ручний відбір проб + лабораторний аналіз);
2)
Автоматизовані
засоби збору місцевизначеної інформації;
3) Вимірювання місцевизначених параметрів в реальному часі в безперервному або циклічному режимах.

Прилади
для моніторингу ґрунтів і угідь.

Перспективним напрямком вважається розробка датчиків для визначення фізико-хімічних властивостей ґрунту на ходу.


За останні 10-15 років електричні і
електромагнітні системи набули великої популярності.
Недоліками картограм електропровідності є
їх залежність від вологості, засоленості, вмісту органічних речовин і
інших параметрів, що
можуть змінюватись незалежно від текстури.
Методи відбору проб.
Чинні
методики відбору ґрунтових зразків, розраховані на широке застосування ручної
праці, прив'язування до місцевості за допомогою орієнтирів, мають низьку
точність визначення місцеположення та високі витрати
праці.
Однією
з альтернатив у проведенні відбору ґрунтових зразків є використання
глобальної системи позиціонування (ГСП), яка вже широко
застосовується в різних регіонах діяльності людини.
У
більшості наук працює правило: не можливо керувати будь-яким об’єктом, чи
процесом, не маючи інформації про його поточний стан. Ми ж на даний час оремо,
сіємо, підживлюємо та захищаємо практично всліпу, не маючи інформації про
реальний агрохімічний та агрофізичний стан поля. Районні лабораторії не
працюють, а більшість господарств по 10…12 років не обстежували свої
угіддя.
Розв’язок
кожної науково-технічної задачі починається із збору фактів і результатів
наукових спостережень і вимірювань. Тому для забезпечення високої достовірності
прийняття рішень в технології точного землеробства необхідно, в першу чергу,
зібрати інформацію про стан ґрунтів: вміст поживних речовин, щільність ґрунту та
структурно агрегатний склад, реальна та прогнозована вологість на час обробітку,
тощо.
На
даний час використовують два основних методи вибірки ґрунту на
аналіз:
-
метод
"сітки";
-
метод
"типу ґрунту".
Метод
сітки.
Здійснення методу сітки засновано на розподілі поля на прямокутники чи квадрати
розміром 0,3-
-
спосіб
центру сітки;
-
спосіб
осередку сітки.
Ціль
методу центра сітки полягає в тому, щоб виміряти рівні питомих речовин у центрі
осередку сітки. При здійсненні вибірки, використовують ГСП системи, щоб точно
визначити центр кожної комірки сітки при проході через поле. Після досягнення
центра осередку сітки береться проба ґрунту і записуються координати (рис. 4.1,
а).
Метод
осередку сітки дуже подібний попередньому за винятком того, що кожна комірка
сітки розбивається на набагато менші частини, де беруться проби ґрунту і після
їх лабораторного аналізу дані усереднюються (рис. 4.1, б). Тобто, кілька вибірок
з середини кожного осередку об'єднані в одну складену вибірку осередку. Таким
чином, обробляється весь осередок сітки в припущенні однакових властивостей
ґрунту.
Здійснення
методу "Тип ґрунту".
Основою до цього методу є вибірки відповідно до типу ґрунту. Фермер робить ті ж
самі процедури вибірки, що описані вище, однак, замість сліпого використання
однорідної сітки, він використовує оглядові карти ґрунту, щоб вибрати
розташування вибірок. Кілька вибірок об'єднані з кожної області різного типу
ґрунту. Цей метод здійснюється по вибірках з різних областей
поля.
Значні
позитивні зміни в галузі відпрацювання технічних засобів вітчизняної СТЗ за
останній час сталися завдяки зусиллям фахівців Національного аграр ного
університету, які спільно з компанією "Сатурн дейта інтернейшнл" створили
програмно-технічний комплекс цілісної системи практичного застосування
СТЗ.
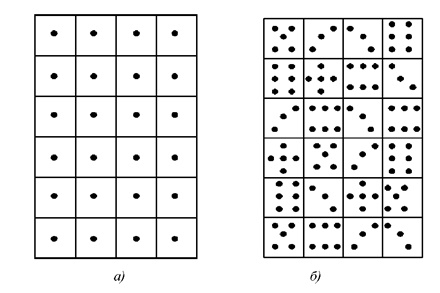
Рисунок - Схеми вибірки проби ґрунту: а) – вибірка у центрі осередку сітки; б) – можливі варіанти розміщення точкових проб для формування змішаної проби
До
структури автоматизованої системи, яка дозволяє виконувати всі основні види
робіт, що потрібні для технологій точного землеробства, входять:
- модуль збирання та реєстрації польових даних
"Алмаз-1";
- модуль реалізації електронних картограм внесень
технологічних
матеріалів "Алмаз-2";
- універсальний програмний модуль роботи з
місцевизначеною
інформацією "Алмаз-Офіс".
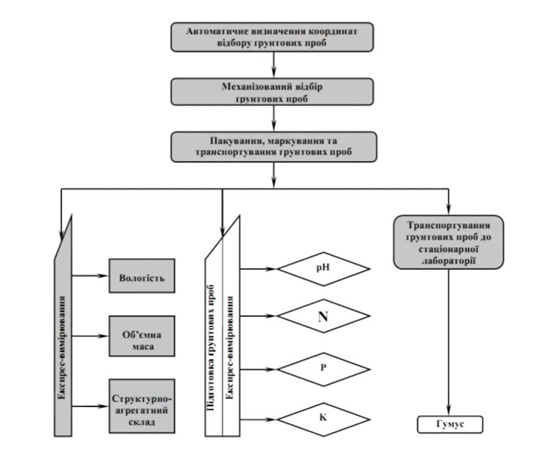
Спеціалістами
УкрНДІПВТ імені Леоніда Погорілого та ЦНДІ НДУ на рівні дослідного зразка,
комплекту конструкторської та програмно-технічної документації створено
програмно-технічний комплекс для експрес-аналізу ґрунтів ПТК "АГРОТЕСТ"',
призначений для агрохімічного обстеження сільськогосподарських угідь,
функціональна схема якої представлена на рис. 4.2.
ПТК “АГРОТЕСТ” включає пересувні лабораторії “АГРОТЕСТ-А” та “АГРОТЕСТ-Б”.
Оригінальним
технічним рішенням пересувної лабораторії "АГРОТЕСТ-А" є конструкція
пробовідбірної труби; розробленої В. О. Ковтуненком, яка, за маси 4-колісного
мотоцикла ЗИМ 350М в

Рисунок
- Загальний вигляд пересувної лабораторії “АГРОТЕСТ-А”
Технологія
відбору ґрунтових зразків складається з таких операцій: об’їзду поля по
периметру і занесенням цифрової карти поля в комп’ютер; вибору точок відбору
проб ґрунту; занесення точок відбору проб на карту поля (рис.).
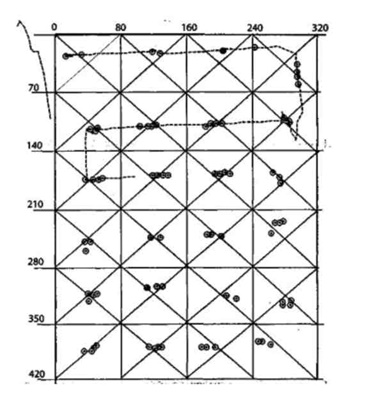
Рисунок - Контури поля та модель плану-завдання відбору проб
Одним
з важливих аспектів ефективності застосування комплексу є проблема вибору
оптимальної площі елементарної ділянки, оскільки її розмір впливає на точність
характеристики агрофону та вартість її проведення. Сучасні супутникові
навігаційні системи дозволяють визначати координати місцезнаходження агрегату в
полі з точністю 1
Точність
відображення вмісту поживних речовин залежить від кількості точок відбору проб і
алгоритму апроксимації. Чим більше точок відбору проб, тим більша точність
апроксимації. Для поля розміром
Застосування
ПТК “АГРОТЕСТ” відкриває можливості коригування агрохімічного стану полів і, як
наслідок, відродження їх родючості, паспортизації угідь та прогнозування
врожайності. Питання за серійним виробництвом та широким впровадженням
комплексу.
Перспективним
напрямком вважається розробка датчиків для визначення фізико-хімічних
властивостей ґрунту на ходу.
В перспективі, як показано на рис. 4.5, такі датчики можуть бути застосовані
безпосередньо з системами ЗНВ (диференціювання норм гербіцидів в залежності від
вмісту органічної речовини) або для створення картограм з подальшим
опрацьовуванням за допомогою ГІС (використання картограми рН перед
диференційованим вапнуванням). Поєднання цих двох стратегій також має
перспективи застосування. Картограми є доцільними тоді, коли параметр, що
вимірюється, має відносно незначну динаміку в часі і його визначення досить
дороге. Датчики, що працюють в реальному часі, мають безсумнівну перевагу при
встановлені рівня динамічних властивостей ґрунту. Проте, відсутність експертної
оцінки під час проведення вимірів є їх значним недоліком.
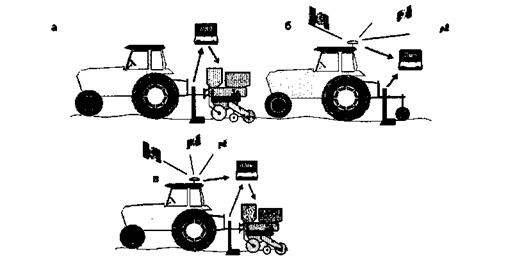
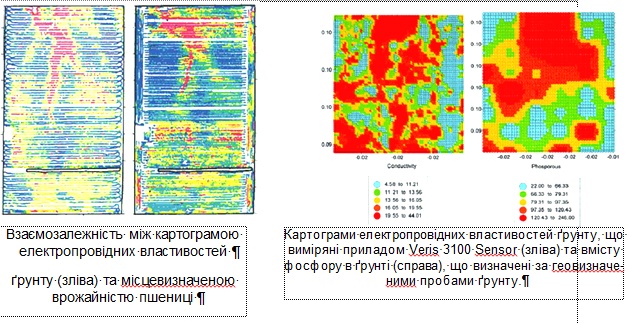
Рисунок – Системи сенсор технологій, що працюють за методом а) реального часу, б) картограм і в) інтегрованим
З точки зору можливостей створити датчики для визначання параметрів ґрунту на ходу, можна виділити п'ять груп приладів, що мають різні принци взаємодії з ґрунтом. За останні 10-15 років електричні і електромагнітні датчики набули самої великої популярності. Близько десяти різних компаній світу виробляють обладнання, що спроможне визначати на ходу здатність ґрунту проводити і накопичувати електричний заряд. Картограми, що створені за допомогою таких надійних і недорогих приладів, насамперед вказують на неоднорідність ґрунтів за текстурою (частки глини є кращими провідниками електричного струму ніж пісок). Саме застосування цих картограм при створенні зон менеджменту є найпопулярнішою технологію, що використовується сьогодні в СТЗ. Додатковою перевагою електричних і електромагнітних датчиків є можливість змінювати глибину вимірів, що дозволяє визначати неоднорідність базової породи яка має безпосередній вплив на родючі властивості ґрунту. Недоліками картограм електропровідності є їх залежність від вологості, засоленості вмісту органічних речовин і інших параметрів, що можуть змінюватись незалежно від текстури.
На
рівні досліджень знаходяться і інші датчики, що спроможні характеризувати
параметри ґрунту. Використання оптичних датчиків дає можливість впроваджувати
алгоритми, що напрацьовані при застосуванні систем дистанційного моніторингу.
Один з таких алгоритмів - пошук кореляції між кольором ґрунту і вмістом
органічної речовини. Більш комплексні алгоритми використовують для визначення
текстури, вологості і навіть залишкового вмісту нітратів. Механічні, акустичні і
пневматичні датчики використовують для визначення фізичного стану профілю ґрунту
з метою встановлення ступеню і розподілу ущільнення. Велика кількість таких
систем пройшла випробування на рівні розробок в той час коли комерційне
використання ще знаходиться у перспективі.
Електрохімічні
датчики також можуть бути застосовані в системах для аналізу ґрунту в реальному
часі. Традиційно, іон-селективні електроди використовуються для визначення рН і
активності багатьох іонів в ґрунтових розчинах. Обладнання для картографування
кислотності або лужності ґрунту на ходу - це одна з новітніх розробок, що вже
почата використовуватись комерційно. Така технологія
дозволяє
одночасне
вимірювання електропровідності і рН ґрунту. При цьому рН визначається
приблизно кожні 10 секунд шляхом прямого контакту між вологою пробою ґрунту і
чутливими мембранами електродів. Результат таких індивідуальних вимірів може
мати більшу похибку ніж лабораторні виміри. Проте, значне збільшення проб (до 10
на гектар) з відносно низькою вартістю суттєво покращує якість і економічність
картограм. Одночасне визначення інших іонів знаходиться на стадії наукових
розробок.
Слід
також і відмітити, що у різних країнах розпочато роботу із створення приладів
для спрощення і здешевлення агрохімічного аналізу ґрунту. Зокрема, фахівці
флагманів електронної промисловості - США і Японії у 1993 р. розпочали створення
оптичних (безконтактних) датчиків для визначення за допомогою ЕОМ вмісту N, Р, К
у ґрунті. Крім того, розроблялись опосередковані шляхи, наприклад, через
урожайність вирощуваної культури на окремих ділянках поля. Для цього збиральний
комбайн обладнується електронним
приладом для перманентного (фр. Permanent, постійний, безперервний)
визначення урожайності культури, яка збирається, і її по координатного запису в
бортовий комп'ютер. Картографування урожайності полів дає змогу знизити трудові
й фінансові витрати на проведення агрохімічного аналізу для застосування
диференційованого удобрення ґрунту у кілька разів.
Разом з
тим необхідно зауважити,
що
застосування
таких
опосередкованих
шляхів проведення агрохімічного аналізу ґрунту забезпечує тільки часткове
зниження масштабності даної проблеми, але не її розв'язання. Одним із
кардинальних рішень щодо аналізу ґрунту на N, Р, К є розробка англійської фірми
“KRM”. Цим способом визначення вмісту азоту, фосфору і калію в ґрунті
здійснюється шляхом фотографування полів у інфрачервоних променях на спеціальну
плівку з літака або супутника Землі.
Досягли
значних успіхів і розробники оптичного приладу для проведення агрохімічного
аналізу. Проблему, яку поки що не вдалося розв'язати американським і японським
фахівцям, розв'язали англійські і китайські.
Прилад, відзначений золотою медаллю на Паризькій виставці у 1998 р., створила англійська фірма “Challenge Agriqulture”. Це оптичний числовий прилад, який шляхом порівняльного вимірювання у двох точках відбитого світла вибраної смуги спектру забезпечує визначення вмісту в ґрунті N, Р, К та інших елементів. Він може обробляти більше 30 параметрів і запам'ятовувати 50 значень. Через 4 роки прилад аналогічного призначення розробили і китайські фахівці. Він побудований на основі транзисторів, перетворювачів, фотодатчиків та інших електронних елементів.
Супутниковий
моніторинг посівів; дрони для моніторингу посівів
Супутникова
система навігації
забезпечує вимірювання відстані, часу та визначає місцеположення необхідного
об’єкта в будь-якому місці Земного шару (не включаючи приполярні області)
майже за любої погоди, а також в космічному просторі поблизу
планети.
На
сьогоднішній день існує 5 навігаційних супутникових систем, а
саме:
ГЛОНАС
(Глобальна
Навігаційна Супутникова Система) - Росія .
GPS (Глобальна
система позиціонування (ГСП) — супутникова система навігації
США.
ГАЛІЛЕО (Європейська
Навігаційна Супутникова Система) - Європа.
Бейдоу
(Навігаційна Супутникова Система) - Китай.
IRNSS
— індійська регіональна навігаційна супутникова система ) -
Індія.
ГЛОНАСС
- це російська супутникова навігаційна система, аналог Американської
супутникової системи GPS, що дозволяє з високою точністю визначати координати
будь-яких об'єктів (зокрема рухомих), забезпечених спеціальними приймачами
(ГЛОНАСС приймачі), на суші, воді і в повітряному просторі. Принцип визначення
положення в повітряному просторі заснований на вимірюванні відстаней до точок з
відомими координатами. З шкільного курсу геометрії відомо, що для визначення
координат об'єкту в просторі потрібно знати відстані до 4 точок з відомими
координатами. В ролі точок прив'язки виступають навігаційні супутники, які
безперервно передають сигнали точного часу. Швидкість розповсюдження
електромагнітних коливань постійна і рівна швидкості світла. Навігаційна система
обчислює затримки в проходженні сигналу і визначає відстань до кожного
супутника. Періодично супутники передають інформацію про параметри своїх орбіт,
яку навігаційне устаткування використовує для визначення координат
об'єкту.
Система
ГЛОНАСС не є новинкою. Ще в 1996 році система була введена в експлуатацію
Міністерством оборони Російської федерації. На жаль, у той час держава не надала
громадянам можливість користування супутниковою навігацією, а військові з часом
зіткнулися з проблемою браку фінансування підтримки системи в робочому стані.
Велика частина з майже 40 запущених супутників вийшли з ладу за різних причин.
Відсутність підтримки держави і неможливість комерційного застосування призвели
до того, що на початку нового тисячоліття система ГЛОНАСС виявилася
непрацездатною.
У
систем ГЛОНАСС і GPS (Navstar) багато спільного. У обох навігаційних системах
використовуються однакові принципи визначення координат і близькі частоти
сигналів. Основні відмінності полягають в параметрах орбіт супутників (супутники
ГЛОНАСС виводяться на меншу висоту, і їх орбіти забезпечують прийом сигналу у
високих широтах) і спосіб кодування інформації в супутникових
сигналах.
Більшість
зарубіжних виробників вже освоїли випуск суміщених (GPS/ГЛОНАСС) приймачів, які
мають дещо кращі характеристики, тоді як устаткування, що використовує тільки
одну систему поступається функціональними можливостями. Схоже, що в цьому
напрямі рухаються і вітчизняні виробники навігаційного
устаткування.
Супутникова
навігаційна система GPS.
Супутникова
навігаційна система GPS була спочатку розроблена США для використання у
військових цілях. Інша відома назва системи - «Navstar». Як відомо, назва «GPS»
є скороченням, що переводиться як Глобальна Навігаційна Система. Ця назва
повністю характеризує призначення системи - забезпечення навігації на всій
території Земної кулі.
GPS
- це супутникова навігаційна система, що дозволяє з високою точністю визначати
координати будь-яких об'єктів (зокрема рухомих), забезпечених спеціальними
приймачами (GPS приймачі) на суші, воді і в повітряному просторі. В данийчас
системою GPS може скористатися будь-який охочий у будь-який час (24 години в
добу, 7 днів в тиждень, 365 днів в році) на більшій частині Землі (виняток
становлять полярні області). Використовуючи навігаційні сигнали системи ОР8,
будь-який користувач може визначити своє поточне місцеположення з високою
точністю. Така точність багато в чому стала можливою завдяки крокам
Американського уряду, який в 2000 році зробив систему GPS доступною і відкритою
для цивільних користувачів. Раніше за допомогою спеціального режиму виборчого
доступу (SA) до сигналу, що передається вносилися штучні перешкоди, що знижували
точність позиціонування до 70-100 метрів. З 1 травня 2000 року цей режим був
відключений, і точність підвищилася до 3-10 метрів.
Основними
перевагами системи GPS є простота використання, надійність приймального
устаткування, висока точність визначення координат і швидкості. Висока
надійність GPS-приймачів обумовлена особливістю методу визначення положення
об'єкту. У приймальній апаратурі немає електронних компонентів, зміна параметрів
яких (із-за старіння або зміни умов експлуатації) могла б стати причиною
зменшення точності. Всі необхідні, для обчислення координат, дані устаткування
отримує з сигналу, переданого навігаційними супутниками.
У систему GPS входять більше 24 супутників, рівномірно розподілених по орбітах навколо Землі. Теоретично у будь-який момент часу з точки на поверхні Землі можна спостерігати половину загальної кількості супутників. Тобто GPS приймач може одночасно отримувати сигнал від 12 супутників. У реальності частина супутників знаходиться низько над горизонтом, або сигнал від них екранується перешкодами і приймач отримує інформацію тільки від 5...9 супутників. Ця кількість достатня для визначення координат з високою точністю.