ТЕХНОЛОГІЇ ПІДВИЩЕННЯ ЕФЕКТИВНОСТІ ОПЕРАЦІЙ В РОСЛИННИЦТВІ
Суть
технологій змінних норм внесення добрив та хімічних засобів захисту
рослин
При
виконанні механізованих технологічних операцій з внесення технологічних
матеріалів (ТМ) таких, як насіння, добрива, пестициди тощо в системі точного
землеробства виникає необхідність в керуванні нормою їх внесення в залежності
від місця положення МТА в полі під час його роботи. Тобто необхідно
застосовувати технології змінних норм внесення (ЗНВ) ТМ. ЗНВ - технологія, що
реалізується за допомогою спеціального обладнання для зміни норм внесення
технологічних матеріалів у відповідності до агробіологічних особливостей кожної
елементарної ділянки поля.
На
рис. 7.1 представлена узагальнена схема формування картограми-завдання на
виконання операції ЗНВ ТМ і комплекс обладнання, що необхідний для реалізації
такого завдання.
Сукупність
операцій з визначення координат МТА в полі, величин і характеру діючих на
сільськогосподарську машину (СГМ) зовнішніх та внутрішніх стаціонарних і
нестаціонарних випадкових навантажень та збурень і випрацьовування керуючих дій
на робочі та виконавчі органи машини з метою оптимізації технологічного процесу
називається місцевизначеним керуванням.
Загальною
рисою місцевизначеного керування технологічними процесами такими, як оранка,
сівба, внесення пестицидів тощо є намагання отримати максимальний прибуток при
мінімальних витратах технологічних матеріалів за рахунок покращення умов росту
та розвитку рослин.
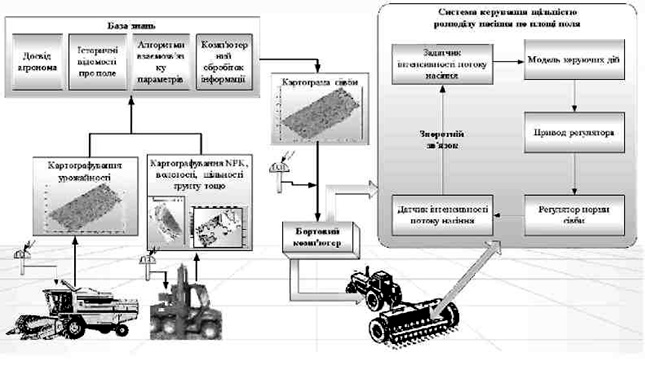
Рисунок
- Схема формування картограми-завдання на виконання ЗНВ ТМ
і
обладнання для реалізації технології (на прикладі сівби зернових)
Економічна
ефективність виконання процесу ЗНВ ТМ залежить від того, наскільки точно (за
координатами) задана маса ТМ буде внесена на задану елементарну ділянку поля.
Це, в свою чергу, залежить від якості функціонування системи автоматичного
регулювання інтенсивністю потоку ТМ.
Напрямки
технічного рішення диференційованого внесення добрив та хімічних засобів захисту
рослин
В
даний час у ряді провідних країн в сільськогосподарській галузі ведуться
роботи із створення технологій і технічних засобів для диференційованого
поверхневого і локального внесення мінеральних і органічних добрив та
мелі-орантів відповідно до оптимальної програми їх застосування. Поряд з цим
намітилися дві концепції реалізації технологій диференційованого
внесення добрив: перша концепція заснована на попередньому аналізі
стану ґрунту і посівів в системі глобального позиціонування (GPS).
Отримані дані використовуються із застосуванням Геоінформаційної системи. Потім
за певною програмою з урахуванням прийнятих обмежень і допущень розробляється
план оптимального застосування добрив з метою отримання заданої врожайності
культури.
На
основі обробки початкової інформації розробляється електронна карта виконання
технологічного процесу на відповідному полі в прийнятій системі
позиціонування.
В
процесі руху машини для внесення добрив по полю за допомогою бортового
комп'ютера в строгій відповідності з електронною картою контроллер забезпечує
внесення необхідних доз відповідного виду добрив на кожну елементарну ділянку
поля з урахуванням фактичної швидкості агрегату і швидкодії виконавчих
механізмів.
Друга
концепція заснована
на отриманні інформації про поле за допомогою датчиків в реальному масштабі часу
без використання електронної карти. Датчики, які функціонують в реальному
масштабі часу, в процесі руху агрегату вимірюють властивості грунту і
характеристики рослин. Потім за допомогою контроллера на основі отриманої
інформації від датчиків регулюється доза внесення добрив або засобів захисту
рослин. Датчики при цьому забезпечують подачу безперервного потоку інформації на
контроллер, на підставі чого здійснюється внесення диференційованих доз добрив
на кожну елементарну ділянку поля. Така технологія не вимагає GPS.
Датчики
можуть бути використані також і в технології, заснованій на застосуванні
GPS.
Отримана з їх допомогою інформація може бути використана для складання
електронних карт які необхідні для виконання відповідних операцій.
Основними компонентами системи для
диференційованого внесення добрив, меліорантів і інших засобів хімізації є:
приймач сигналів GPS, бортовий комп'ютер, контроллер, пристрій для вимірювання
швидкості руху агрегату.
Технологічний
процес диференційованого застосування добрив в системі точного землеробства є
складною системою, що включає набір технологічних операцій і технічних засобів.
Основу системи точного землеробства складають:
•
банк
даних про врожайність с.-г. культури, історії застосування добрив, які
представляються в системі координат, жорстко пов'язаній з конкретним
полем;
•
програмне
забезпечення, що дозволяє графічно представляти отриману інформацію, аналізувати
її і ухвалювати управлінські рішення по необхідній дії на кожну з ділянок поля
зі своїми координатами;
•
технології
і автоматизовані технічні засоби для диференційованого внесення засобів
хімізації в прийнятій системі позиціонування.
Технологія
диференційованого застосування добрив базується на трьох технологічних
блоках:
-
визначення
координат агрегату на полі. Це може бути здійснено наземними або космічними
системами позиціонування. Є підстава вважати, що в найближчому часі переважатиме
диференційнована глобальна система позиціонування (DGPS).
-
автоматизований
збір, зберігання і обробка інформації про стан ґрунту, рослин, візуалізація цієї
інформації у вигляді електронних карт (GIS), ухвалення оптимальних управлінських
рішень.
-
машини,
системи контролю і управління технологічним процесом диференційованої дії на
систему «грунт-рослина» в прийнятій системі
позиціонування.
Враховуючи,
що два перші елементи широко використовуються в інших галузях народного
господарства, вони швидко розвиваються поза рамками сільського господарства. На
розробці машин, систем контролю і управління технологічним процесом повинні бути
зосереджені зусилля інженерів машинобудівних підприємств різних
країн.
За
допомогою GPS, бортового комп'ютера і програмного забезпечення відбувається
взаємодія виконавчого механізму машини з електронною картою поля, на якій
представлена інформація про дозу внесення добрив, норму висіву насіння і
застосування пестицидів.
Наявність
цієї системи на борту машини дозволяє контролювати всі операції. Так, GPS
визначає і видає на дисплей місцезнаходження машини для внесення добрив.
Бортовий комп'ютер з відповідним програмним забезпеченням використовує цю
інформацію для визначення дози добрива, яку необхідно внести в цьому
місці.
Бортовий
комп'ютер може працювати спільно з контроллером або замість нього, якщо є
необхідне програмне забезпечення.
Складання
електронних карт і визначення доз внесення здійснюється в більшості випадків
службами, що спеціалізуються на диференційованому застосуванні засобів
хімізації. У їх функції входять: відбір проб, складання карти поля, моніторинг
урожаю, складання карт врожайності і т. д.
Основним
елементом машини для диференційованого внесення засобів хімізації є контроллер,
що виконує функції мікропроцесора або ПК. Він пов'язаний з виконавчим механізмом
машин і контролює дозу внесення. Контроллери можуть відрізнятися по складності -
від одноканального до 260-канального. Один канал контролює дозу внесення одного
елементу живлення рослин. Контроллер може бути створений для однієї машини або
бути універсальним і використовуватися на різних типах машин. Інформація від
контроллера може подаватися на ПК і зберігатися в його пам'яті або записуватися
на магнітний носій даних. Багато контроллерів працюють спільно з портативним
комп'ютером, що знаходиться в кабіні трактора. Якщо агрегат оснащений приймачем
сигналів ОР8, то оператор може визначати своє місцезнаходження, величину дози,
яку він вносить, швидкість і так далі. Контроллери, які не працюють спільно з
ПК, висвічують на своєму дисплеї: дозу внесення, швидкість руху, кількість
внесених добрив, величину обробленої площі. Для того, щоб контроллери успішно
функціонували, машини для диференційованого внесення повинні мати робочі органи,
які здатні точно змінювати дозу відповідно до команд, що поступають від
контролера
(рис.).

Рисунок - Розкидач мінеральних добрив оснащений бортовим комп’ютером з інтегрованим приймачем GPS
Диференційоване
внесення добрив чи хімічних засобів захисту рослин в реальному часі без
використання електронних карт полів
Ярким
прикладом обладнання, що відповідає поставленому питанню є GreenSeekerRТ200 (рис.), який
має такі функції:
- сенсор сканує рослину за допомогою променів СВД
(світловипромінюючого діоду) ;
- оптично розпізнає стан культури, використовуючи
вегетативний індекс;
-
передбачає
потенціал врожайності;
-
визначає
оптимальну норму внесення азоту для певної зони;
-
надає
змінну норму внесення;
-
розмір
зони 0,1 - 0,2 гектара.

Рисунок – Зовнішній вигляд GreenSeekerRТ200